前幾天雷鳥發佈了57吋120Hz 雙4K(7680*2160)MiniLED的U9顯示器,讓我非常心動,很適合用於賽車模擬器。可是書房佈置賽車模擬駕駛已經花費了不少錢,57吋U9已經超出了我的預算。

在觀看顯示器入手攻略的時候注意了雷鳥Q7,有網友說它是滿足hva、10bit、高hdr、可支架等條件的顯示器裡面,至實惠的一款。然後我就想到了一個更具性價比的方案:購買三台27吋雷鳥Q7搭配棱鏡膜,即可實現72吋7K(7680*1440) 240Hz的超寬MiniLED顯示器。花費只有雷鳥U9 57吋的一半,雷鳥Q7雙十一限定1859一台,三台也不超6000;還獲得了高一倍的刷新率,240Hz比120Hz更流暢絲滑。
三聯屏搭建技巧
三個屏幕的組合不是簡單的擺放,是有一個科學的規則的,首先要面對的是視域問題(FOV),因為人眼的視場角是有限的。橫向的情況下,人眼的橫向視域至多190度左右,縱向至多120度左右。如果考慮空間感知和顏色辨別,視域會更窄,橫向至多60度左右,縱向至多55度左右。因此三連屏的組合的角度有要求,與人的距離也有要求。

此外為了更擬真,不同遊戲,還會有不同的情況。雷鳥Q7自帶的支架支援上下(90mm),傾斜(-5-15度)和旋轉(水平±20度,垂直±90度),能為三屏組合提供了方便,也省下了另購支架的錢。事實上雷鳥的這種三角形支架也很適合組合屏使用,大支架穩定性高,也利於定位設定角度。

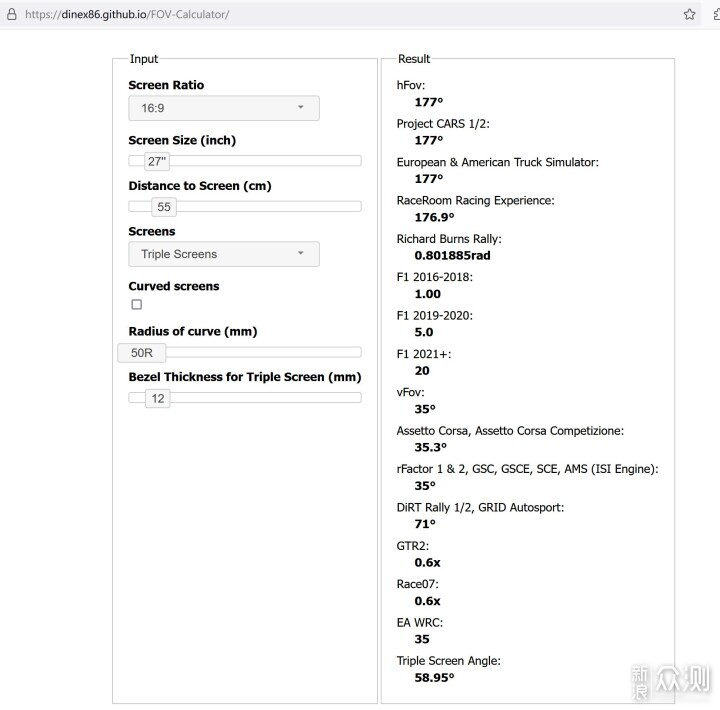
推薦使用dinex86的FOV計算器,只要輸入顯示器的參數,即可針對性地計算出FOV。我使用的雷鳥Q7,畫面比例是16:9,尺寸是27英吋,距離顯示器是50cm,邊框是6mm,不要勾選曲面屏(Curved Screen),計算得到的數據如圖所示。
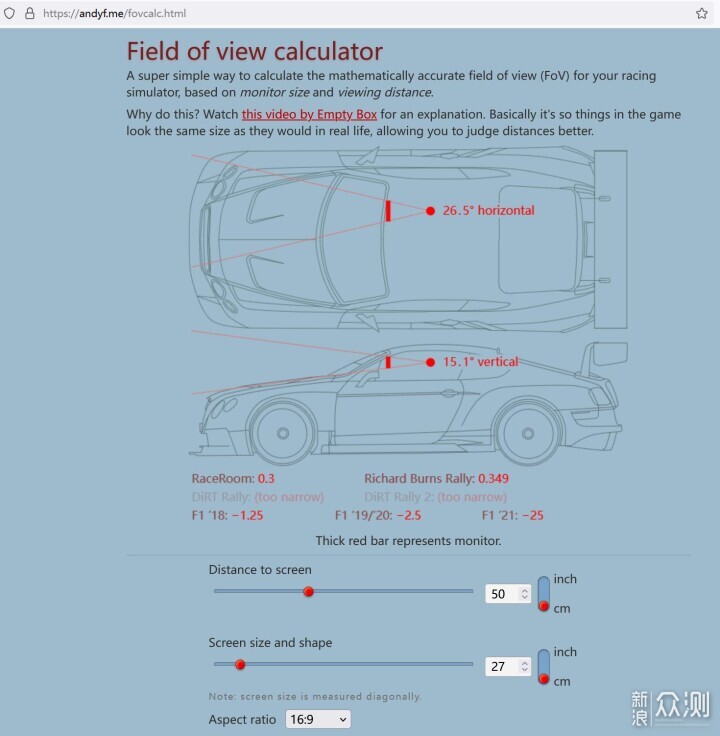
andyf的FOV計算器更為直觀,但是調節的參數較少,例如沒有辦法針對三聯屏或曲面屏作出細化計算。如果使用的是像雷鳥U9 57吋顯示器,andyf的FOV計算器就會很合適。
搭建完成後,就是很常規的Surround組三聯屏。Nvida的Surround不同於AMD的Eyefinity,是不能異參屏拚接的,所以三款顯示器的參數要一致,不然就會根據參數低的那款屏幕為標準進行組建三聯屏。
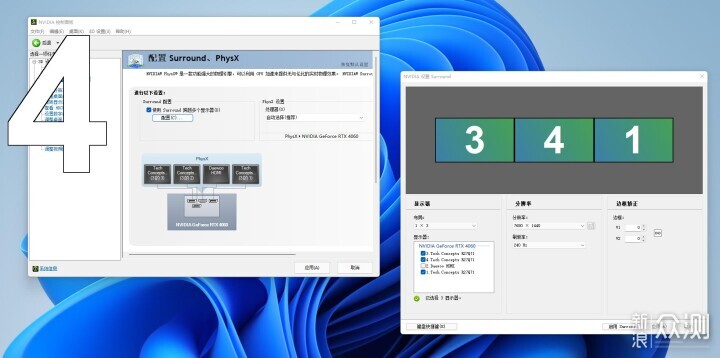
英偉達40系甜點卡一般提供有三個DisplayProt和一個HDMI輸出接口,三聯屏為了兼容性,要求都插在DisplayProt輸出接口下。遇到過DisplayProt和HDMI組跨屏,刷新率被限制到60Hz無法變更。同時不要調節Surroun的邊框修正,因為後面要使用棱鏡膜消除邊框,此處如果修正過邊框的話,就會出現畫面錯位的問題。

雷鳥Q7具有一個DP 1.4, 兩個HDMI視頻接口組建三聯屏之前我還擔心三款顯示器的色彩不一致,要進行匹配。實際測試發現完全是多慮了,三台雷鳥Q7的色彩都很接近,不需要校色儀直接組屏也行。雷鳥的QD量子點廣色域技術(95% DCI-P3,99% sRGB色域)和專業色彩調教(ΔE<2)還真的不是說說,很讓人放心。
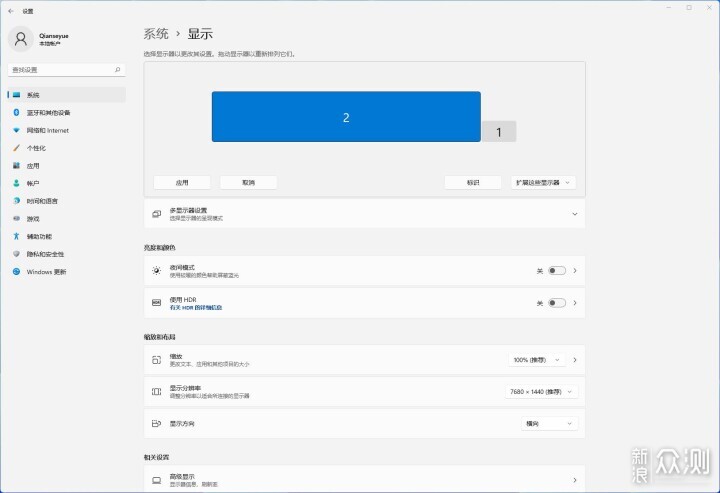
組屏完成後,系統顯示中就會得到一塊7680*1440的虛擬顯示器。左側還有一塊標識1的小屏幕,這個不是開啟了PIP或PBP技術,而是我自己利用廢棄平板DIY的一塊小屏,用了作為儀表板的。

模擬駕駛都喜歡使用一塊小副屏,通過SimHub軟件實現更豐富的信息。使用雷鳥Q7自帶的PIP或PBP技術是一個方法,不過還是有一塊單獨的屏幕更合適。
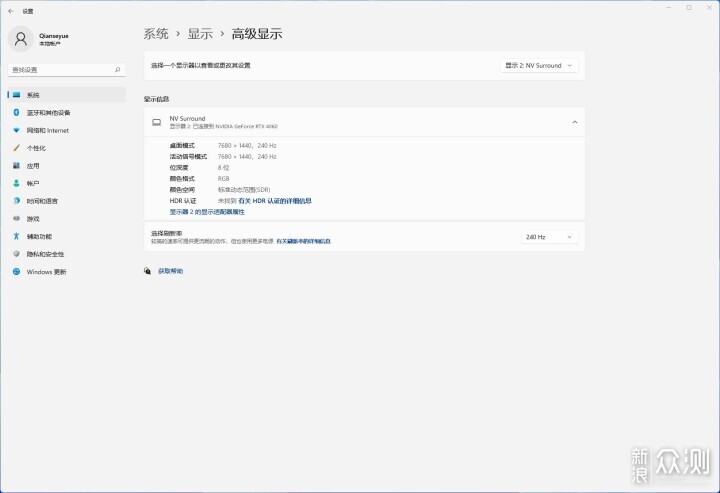
需要注意預設三塊顯示器組屏後,由於Surround的BUG,刷新率會跳到60Hz,要手動調回240Hz。
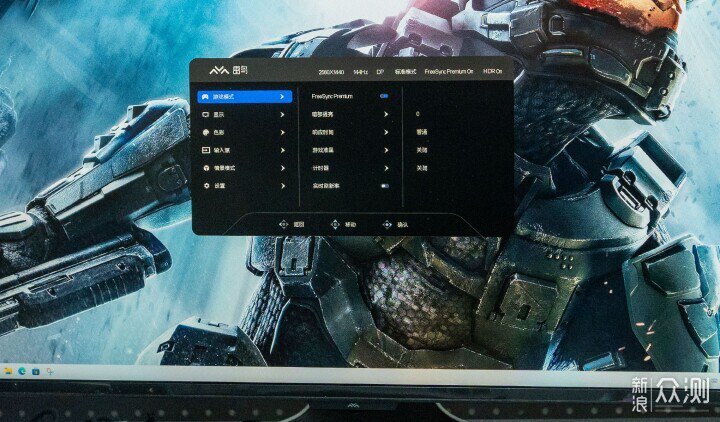
此外顯示器的OSD菜單中,也要保證在組屏前開啟好FreeSync Premium技術,有效減少撕裂的情況。組屏後再調節OSD菜單里關於畫面的參數,會有可能出現畫面錯誤或者三聯屏組建失敗的情況。
無邊框實現方法
三頻搭建完成後,就是邊框的消除。初期是模擬駕駛社區玩家的DIY,是一種稱為Bezel free kit的套件,通過特殊膜的折射,使得邊框消失。

ROG也推出過相關的顯示器配件,但是價格很高,二手也要300左右。社區版本就實惠很多,使用紙板就能自己製作。
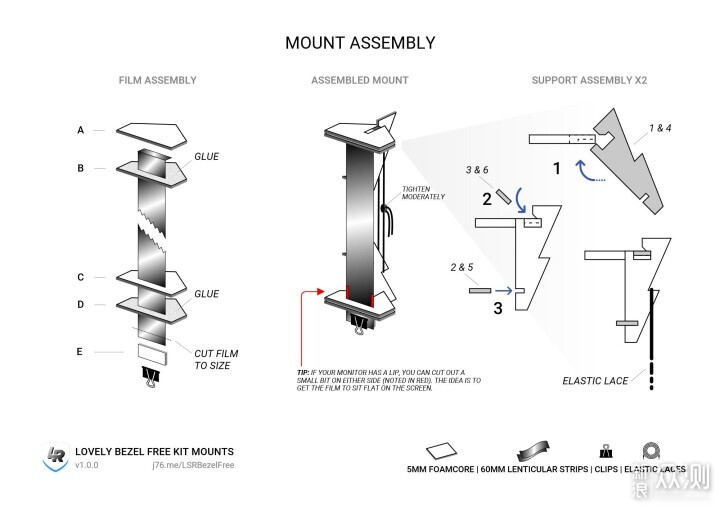
這個特殊的膜可以是顯示器裡面的復合增亮膜,又或者是棱鏡膜,或者菲涅爾波帶片。以前這些膜都是進口的,算尖端技術。現在膜已經完成本地化,價格很卷,三十多塊錢就能在某寶買到一米長的復合增亮膜。再利用紙板裁剪的固定支架,總成本不超過50。有3D打印機的話,可以像我這樣使用3D打印件搭配絲杆,比紙板牢固結實。絲杆也能支撐到桌面上,讓兩個顯示器不容易錯位。

雷鳥Q7的側面的帶有耳機掛架的,抽出即可使用。有顧慮掛架影響三聯屏的組合,實際組建期間發現完全沒有影響,這個掛架隱藏的很好。組成三聯屏後,右側顯示器的耳機掛架還能保留,發揮其作用。

這些膜的原理都是通過折射,實現對邊框的隱藏。在我們使用的顯示器裡面,就有一層這種增亮膜,當我們的讓兩台顯示器以一定角度組合,再添加一塊膜在前方,就會形成一個三棱鏡。
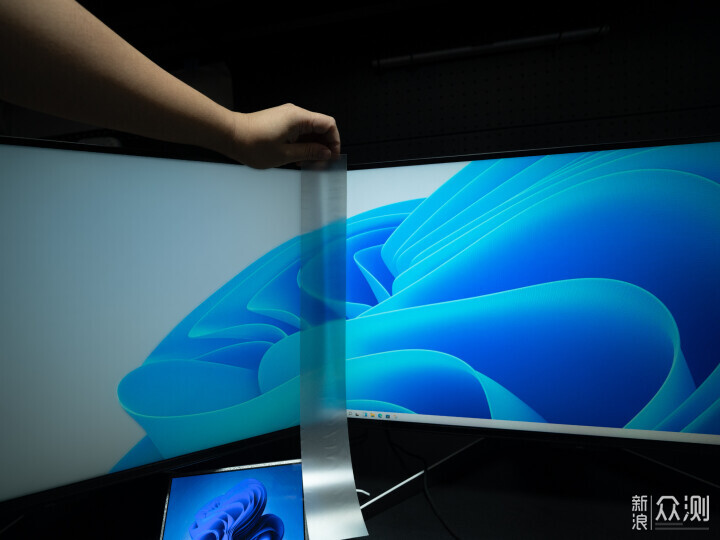
棱鏡會將入射光線折射90度,人就沒法看到膜前方的邊框了。要自己細調膜的位置,太靠近兩個屏的折角,中間的邊框就會露出。太遠的話,畫面又會有斷層。還有就是增亮膜增加了光的反射,一半50%的光會邊反複利用,這樣人看到膜的時候,就會感覺和顯示器屏幕一樣亮。膜質量越好,看到的畫面就會越清晰。便宜的增亮膜效果就會很一般,仔細看會注意到膜的畫面比顯示器的要暗了一度。
而且近看字體會有模糊的情況出現,根本原因還是膜效果不行,產生了一些衍射降低了畫質,看久了眼會疲勞。選擇像雷鳥Q7這種的DC直流調光的顯示器,能把這個影響降低一些(雷鳥Q7是16bit DC純直流調光,還有8通道AM驅動,亮度更均勻)。

極致吻合的方式,是直接從原雷鳥Q7顯示器上面撕一塊增光膜進行DIY,會更清晰,但是這麼一來成本很高。改善的方法是提高顯示器的亮度,亮度越高,畫面效果越好。

雷鳥Q7的峰值亮度可達1400nits,黑場低至0.001nits,有DisplayHDR 1400認證。而且散熱也做得很好,並非短暫實現高亮。親測亮度100%的情況下,畫面質量很佳,玩遊戲肯定是可以滿足需求的。

FOV調節恰當,邊框完美消除後,開啟神力科莎體驗,感覺從方向盤看過去的視角,是很接近賽車車內視角的,至此72吋7K(7680*1440) 240Hz的超寬MiniLED顯示器的搭建算是完成了。
優化設置讓畫面更流暢
神力科莎偏技術,工作之後玩的已經比較少,玩的越來越多是地平線這種偏休閑的駕駛遊戲,分享一些MiniLED背光顯示器運行地平線5的設置參數,讓遊戲體驗更佳。

設置前要清晰自己MiniLED顯示器的背光分區,像我使用的雷鳥Q7就是1152分區的,而且確定是一個分區內有一個MiniLED燈珠的,一定要開啟夜間陰影,以及將陰影質量調節到高選項。光感會肉眼可見的提升,通過擋風玻璃照射進車內的墨西哥陽光就是炫,很真實光影體驗。分區少的MiniLED顯示器就不要開了,因為分區少的情況下,顯示器會犧牲亮部來保證暗部,光感就會沒那麼真實,開啟夜間陰影還會加劇這種情況,讓畫面偏的嚴重。

我使用的只是英偉達的甜點卡,所以針對抗鋸齒的算法,就不要開啟DLSS或者DLAA了。三聯屏下開啟這些會很吃顯卡性能,畫面的優化也沒有預期的好。反而是針對性設置環境紋理質量,環境幾何質量,非等方性過濾,MSAA,車輛精細度等選項,遊戲畫面體驗感更好。

現在英偉達的甜點卡雖然依舊被精準刀過,但是已經不像以前那麼吝嗇顯存了。儘量把環境紋理質量和環境幾何質量設定到高,畫面會細膩不少。雷鳥Q7是HVA面板的,比傳統VA面板色彩優秀,而且光暈控制也強,開啟高質量環境紋理後,風光有以假亂真的感覺。地平線5在製作的時候,採取了不少墨西哥實景的精細模型的,高質量寬屏下玩地平線享受沿途的風光,那更是駕駛樂趣。

甜點卡預設在7K(7680*1440)下是跑不滿 240Hz的,常規公路場景幀數大概是在120-165幀之間徘徊,雨林場景會低一些,在100幀左右。影響幀數比較明顯的是SSAO選項,關閉後幀數會提高很多。SSAO是環境光遮蔽調節選項,實際就輪廓陰影這種小細節優化,算是簡化版的光追。甜點卡而言開啟SSAO,粒子效果,光線追蹤等參數還是比較吃力,關閉後幀數會高不少。光影效果還是留在車房裡面欣賞用比較合適,駕駛的時候流暢度更重要。

影響畫面流暢度除了高刷,還有響應速度。MiniLED背光的顯示器初期不被遊戲玩家認可,和響應速度的關係很大。尤其是MiniLED使用了VA面板,而VA響應速度慢在遊戲玩家裡面可是眾所共知的。雷鳥Q7支援HVA,實際遊戲體驗裡面,響應速度挺可以的。漂移這種高速移軸鏡頭下,沒有明顯的模糊感或者畫面撕裂。

保證畫面的真實感,鏡頭效果還是開啟一下,三聯屏的邊緣畫面的畸變會改善,看起來會更自然。至此針對MiniLED顯示器的優化算是完成了,7K(7680*1440) 240Hz的超寬MiniLED顯示器玩模擬駕駛是真的現場感很強。
後記
搭建好顯示器後,整套設備的瓶頸來了方向盤模擬器和電腦主機這邊。現有的RTX4060並不能完全發揮7K(7680*1440) 240Hz顯示器的性能,平價成品方向盤模擬器的真實感也不足,後面我將會升級顯卡到RTX4090,方向盤模擬器等設備也會DIY升級一波,感興趣的可以關注我的更新。



